Lesson 33 – Radio Detection And Ranging (RADAR) 1#
Learning Outcomes#
Describe how a RADAR determines the range to a given target.
Compare and contrast the differences between the RADAR equation and the Friis equation.
Identify all variables of the RADAR equation.
Apply the RADAR equation to a given RADAR problem.
Determine “who sees who first” when a RADAR is attempting to detect a target with a RADAR warning receiver.
Radio Detection And Ranging (RADAR) 1#
Introduction#
The fundamental principles of RADAR are fairly straightforward – the system sends energy out into the world and measures what comes back. Based on the returns from the transmitted signal, the RADAR identifies where objects are and how far away they are. Additionally, RADAR is an acronym, standing for RAdio Detection And Ranging. Simply put, with RADAR we use radio signals to tell if anything is there (detection) and to tell how far away it is when we find something (ranging). Modern RADARs have many more capabilities, but we’ll stick to the basics for this course.
RADAR Range#
Calculating the range to a target is a fairly straightforward matter and uses basic physics principles. Since we know that electromagnetic waves travel at the speed of light, the amount of time between sending an energy pulse and receiving its echo is all we need to determine the range to the target.
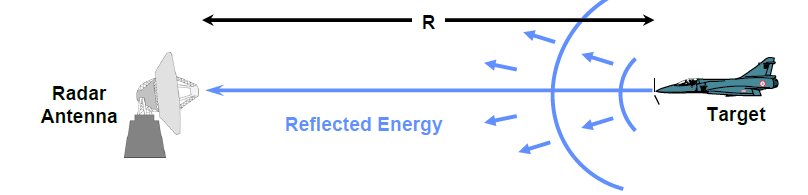
Figure 1: A basic RADAR scenario.
Therefore, if t is the elapsed round-trip time for the signal to travel to the target, reflect from it, and then return to the RADAR receiver, then the range to the target is:
where c is the speed of light. The factor of two in the denominator converts the round-trip time into a one-way time between the RADAR and the target.
Example Problem 1#
A RADAR signal returns 573.4 μs after being transmitted. How far away is the detected object?
Understand: RADAR signals travel at the speed of light, and we can determine how far they’ve travelled based on how long it takes them to make the round trip. It is important to remember RADAR involves a two-way trip.
Identify Key Information:
Knowns: The signal’s round trip time.
Unknowns: distance to the target.
Assumptions: We are receiving the signal directly reflected from the target and not one that has bounced around off of other objects.
Plan: We will calculate how far the signal travelled and then divide by two for the two-way trip.
Solve:
Answer: The object is 86 km away.
RADAR Detection Range#
Once you find an object with a RADAR, calculating its distance is easy. The problem is actually finding the object – aircraft or incoming missile from over the horizon. In this lesson, we’ll focus on how far away RADAR can detect a target based on the same principles we used with the Friis equation. Next lesson, we’ll talk about more advanced RADAR capabilities, which are used to detect multiple targets.
First, let’s look at a RADAR’s maximum range, which is a specific application of the communications concepts we’ve already learned. In order to detect a target, we need to have LOS to the object and then get enough energy to the target so that, when the energy is reflected, it can travel back to the RADAR’s receiver where it will be detected and processed. In the simplest RADAR scenario, we are considering the receiver to be co-located with the transmitter.
Let’s look at LOS range how it affects our RADAR’s maximum range. This follows the exact same process as determining whether two radios have LOS. While there are RADARs that use RF propagation methods other than LOS (e.g., forward scatter), most RADAR systems rely on LOS, so we must first ensure our RADAR is within the maximum LOS range:
\(r_{max,LOS} = \sqrt{2h_{radar}} + \sqrt{2h_{target}}\)
Once the target is within the maximum LOS range, we also need to deliver energy to the target and then collect the reflected energy. Since electromagnetic energy from a RADAR makes a round trip (compared with the one-way trip for a radio), we’ll need to modify the Friis equation to handle this new scenario. Using the same principles as with the development of the Friis equation, the power density reaching the target will be:
When we developed the Friis equation, we multiplied this power density by the receiving antenna’s effective area to find how much power was received. In that case, we want the receiver to collect as much energy as possible. However, with RADAR, the target is reflecting the energy rather than receiving it. We use a parameter called RADAR cross section (RCS) to quantify how much of the impinging signal is reflected by an object. RCS is denoted by the Greek symbol σ and most often given in units of m^2^, although it can also be given in units of dBsm (dB/m^2^). As a side note, developing “stealthy” aircraft involves employing a myriad of techniques to reduce the RCS as much as possible, thereby making the aircraft look “small” (or invisible) to the RADAR. These modifications range from structural changes that deflect signals instead of reflecting them to special coatings which absorb the energy instead of reflecting it. Even though a B-52 and a B-2 are roughly the same size from head on, the B-2 is specifically designed not to reflect energy back to the RADAR, so its RCS is much lower and the aircraft is much harder to detect.
For this course, we will use a single “average” value to describe an object’s RCS, but in reality, this value changes depending on the orientation of the object with respect to the RADAR.
Now, the power reflected from the target back to the RADAR receiver is:
At this point, the reflected signal will travel back to the receiver at the speed of light. Again, the energy will “spread out” on a spherical surface, with the distance between the RADAR and target, \(R\), being the radius of that sphere. Therefore, the power at the receiver will be:
We must then “catch” this power with the receiving antenna’s effective area which is:
Therefore, the received power at the RADAR is:
Combining and simplifying—and assuming we’re using the same antenna for both transmission and reception—we find the final form of the RADAR equation.
Key Concept – RADAR Equation
\[P_{R} = P_{T}G^{2}RCS\frac{\lambda^{2}}{(4\pi)^{3}R^{4}}\]
Let’s look at the differences between received power for a RADAR versus a communications link:
Doubling transmitted power also doubles the received power – this is the same as before.
Doubling the RADAR antenna’s gain, quadruples the received power, because we’re effectively doubling both transmit and receive antennas at once.
Doubling the system’s wavelength quadruples received power – this is also the same before. Therefore, by using a lower frequency, more power arrives at the receiver. One challenge here is that reducing the RADAR’s frequency also decreases the RADAR’s accuracy, which we’ll discuss shortly.
Doubling the distance between the RADAR and target reduces the power received by a factor of 16 – this is the biggest difference between RADAR and communications.
This last fact makes building an effective RADAR system difficult. The received power is almost always incredibly small. This requires RADARs to have much more sensitive receivers than a radio. Also, most modern RADAR receivers have the ability to integrate their received power over the duration of the pulse width and extract all possible energy in the pulse. Therefore, the longer the pulse duration, the more energy the receiver can detect, giving a better signal-to-noise ratio.
In practice, aside from making smart design choices (stealthy materials and sharp angles), we might ask what else can be done to help identify when a RADAR wave impinges on your aircraft or weapon system. Fortunately, a device called a RADAR Warning Receiver (RWR) can alert us to the presence of RADAR wave. An RWR is basically a receiving radio that “listens” for the electromagnetic waves generated by a RADAR. Therefore, we can calculate the effective “listening” range of the RWR using the Friis equation. In general, if we are trying to avoid RADAR detection, we would like to know about a RADAR before it knows about us. However, if we are designing a long range RADAR system, we want the opposite to be true: we would like to detect the target before its RWR can detect our signals.
Example Problem 2#
A B-52 with an RCS of 100 m^2^ is ingressing hostile territory at 30,000’ AGL. The enemy RADAR is on a 100’ hill and has the following parameters:
PT = 1 kW
G = 150
f = 300 MHz
Minimum PR = 12 fW
The B-52 has an RWR to detect enemy RADAR signals. Its parameters are:
G = 3.0
Minimum PR = 215 nW
Who sees who first (i.e., who is the first to establish positive detection)?
Understand: Here, we have a friendly plane flying a sortie in the vicinity of an enemy’s RADAR. The friendly plane has an RWR with a given sensitivity – a minimum power needed to detect a signal. The sensitivity will give us the maximum range (since power and range are inversely proportional). We are asked to determine whether the RADAR sees the plane first, or if the RWR does its job and alerts the B-52 to the RADAR first.
Identify Key Information:
Knowns: We know the key parameters for both the RADAR and RWR.
Unknowns: We do not know the LOS or detection range for either the RADAR or RWR.
Assumptions: We assume the B-52’s RCS is appropriate for its orientation to the RADAR. We also assume the gain for both antennas is representative of the orientations.
Plan: This problem uses almost all of the concepts from the last few lessons. We need to solve for three separate ranges: the maximum LOS range between the B-52 and the site, the maximum RADAR detection range for the enemy’s RADAR site, and the maximum communications range for the B-52 warning receiver.
Solve: Let’s solve the LOS piece first.
The high altitude that the B-52 is at flying allows LOS to be established at a long range.
Now, let’s look at how far away the RADAR can detect the bomber. First, we need to solve for the signal’s wavelength
Next, we use the RADAR equation, recognizing that the minimum power received gives the maximum range:
After some algebra machinations, we solve this equation
Plugging in the values in the problem,
Therefore, the RADAR will detect the bomber when it is 98.6 km away.
Finally, we can calculate how far away the bomber will be able to detect the RADAR. Since the RWR on the bomber is a “listening” radio, we need to use the Friis equation. As with the RADAR equation, we will need to solve the Friis equation for R, again recognizing that the minimum power received is the maximum range:
Since LOS is established at 417.1 km, both the RADAR site and the B-52 are capable of seeing each other at that range, but they don’t have enough power. Since the bomber’s RWR can detect the RADAR at 115.1 km, but the RADAR does not detect the bomber until 98.6 km, the bomber will see the RADAR before the RADAR will see the bomber.
Answer: The B-52 is the first to detect.
Example Problem 3#
Given the previous scenario, but instead of a B-52 at high altitude, let’s use a B-1 (with a smaller RCS of 10 m^2^) ingressing hostile territory at 200’ AGL. All other parameters are the same. What is the range that the RADAR will detect the B-1?
Understand: This is the same as the problem before, but now we have changed the aircraft, which means we need to recalculate the LOS range (since the altitude of the aircraft has changed) and the RADAR detection range (since the RCS, σ, has changed).
Identify Key Information:
Knowns: We know the new altitude, the new RCS (\(\sigma)\), and the RADAR parameters.
Unknowns: We do not know the new LOS range or the RADAR’s detection range for the B-1.
Assumptions: As before, we assume the aircraft’s RCS is appropriate for its orientation to the RADAR. We also assume the gain for both antennas is representative of the orientations.
Plan: We need to solve for two ranges: the maximum LOS range between the B-1 and the RADAR site and the maximum RADAR detection range for the enemy’s RADAR site.
Solve: Let’s solve for the new LOS range first:
Now, let’s look at how far away the RADAR can detect the bomber. First, we start with the re-arranged RADAR equation,
Plugging in the values in the problem,
Using the same logic as before, we see that the RADAR can detect the returned signal from the B-1 at 55.4km, but doesn’t have LOS until 54.97 km.
Answer: The RADAR will detect the B-1 at 54.97 km.